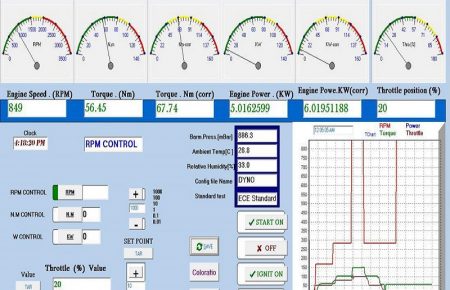
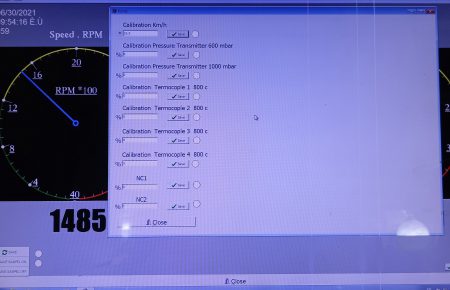
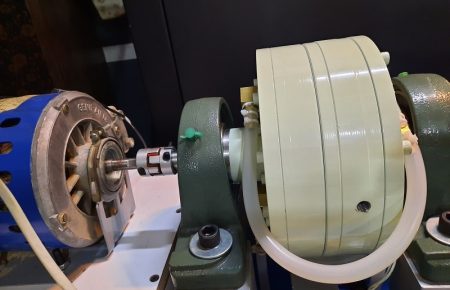
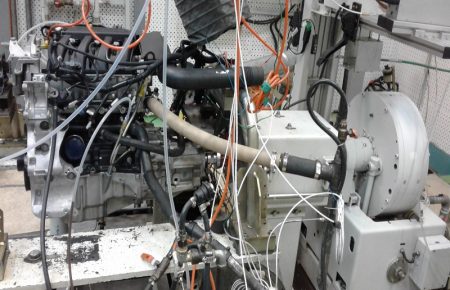
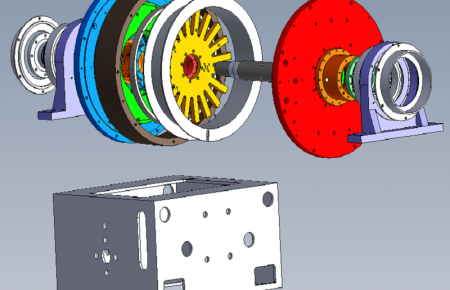
دراین مقاله هدف شناسایی و کنترل گشتاور سیستم دینامومتر ادی کارنت می باشد و نحوه باردهی و ایجاد ترمز مغناطیسی جهت شفت دوار انواع موتورهای بنزینی و الکتروموتورها مورد بررسی قرار میگیرد. شفت دینامومتر با یک کوپلینگ به شفت چرخان موتور کوپل می شود و از طریق کنترل گشتاور سیستم دینامومتر امکان تست بارگیری از موتور در نقاط کار مختلف فراهم می شود. سیستم کنترل گشتاور دینامومتر دارای یک سیم پیچ در داخل دینامومتر است که با ایجاد جریان مختلف سرعت دورانی آن کنترل می شود. اپراتور با تحریک بار دینامومتر میزان گشتاور را کنترل می کند ولی به علت تغییرات دما و تغییرات دور موتور و عامل های دیگر این گشتاور تغییر می کند و اپراتور باید دوباره آن را تنظیم کند، جهت جلوگیری از این عمل باید سیستم دریک لوپ بسته پی آی پی کنترل مورد تست قرار بگیرد تا به صورت اتوماتیک گشتاور و دور ثابت بمانند.
مراحل کار به این صورت می باشد:
- تعیین مقدار گشتاور مطلوب
- جریان دینامومتر
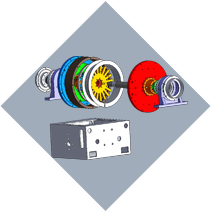
- دینامومتر
- موتور
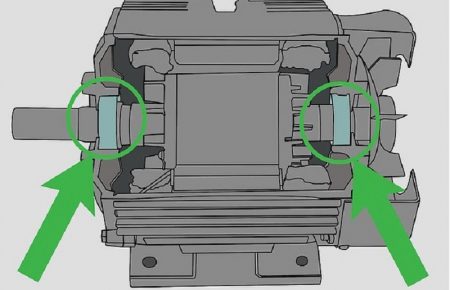
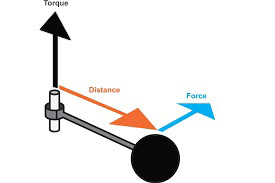
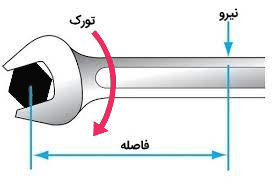
دینامومتر ادی کارنت شامل ترمز، نیروی اندازه گیری و اندازه گیری سرعت و غیره است. ترمز میزان بار نخستین حرکت را تنظیم می کند و در عین حال قدرت جذب شده نخست موتور را به گرما تبدیل می کند که توسط آب گرفته شده است. اندازه گیری گشتاور سیستم دینامومتر ادی کارنت بر اساس اصل همان مقدار گشتاور اعمال شده و گشتاور واکنش با جهت مخالف است. بنابراین گشتاور را می توان با گشتاور چرخش دینامومتر اندازه گیری کرد. دینامومتر ادی کارنت گشتاور و قدرت محرک اولیه را اندازه گیری می کند. روتور با کمک شفت موتور شروع به چرخش می کند. از آنجایی که شار مغناطیسی تولید می شود و روتور این جریانهای مغناطیسی را قطع می کند و جریان چرخ دنده در مقابل تغییر شتاب مغناطیسی در روتور ایجاد می شود.